人工智能和计算机视觉(5)-边缘检测
边缘检测
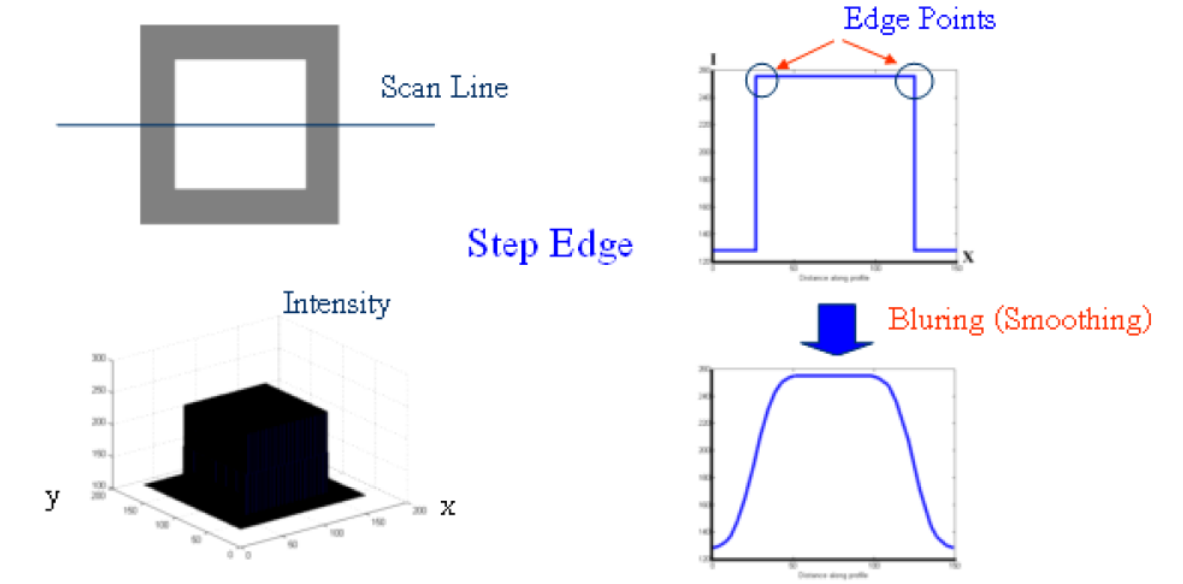
边缘主要包括轮廓线边缘和纹理边缘
寻找图像中的边缘是为了找到变化非常强烈的相邻像素,例如从0-255或从255-0。
Robert算子(Robert operator)
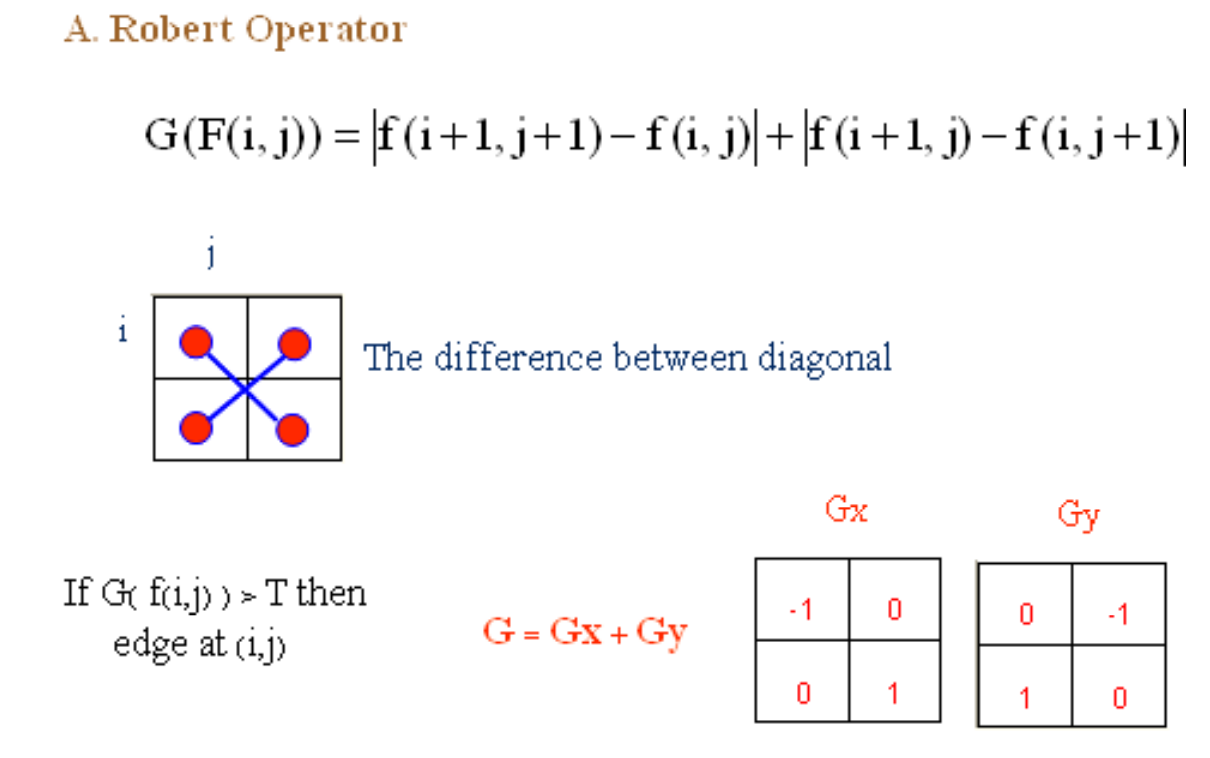
I[i, j] : 图像中的像素值
通过高斯滤波器卷积图像,我们将得到
是高斯分布。
使用以下公式创建一个过滤器:
边缘像素
边缘像素的
广义的霍夫(Hough)变换
在目标图像中寻找任何形状。
包含2个主要模型。
- 保留模板形状的细节。
- 搜索目标图像内的形状。
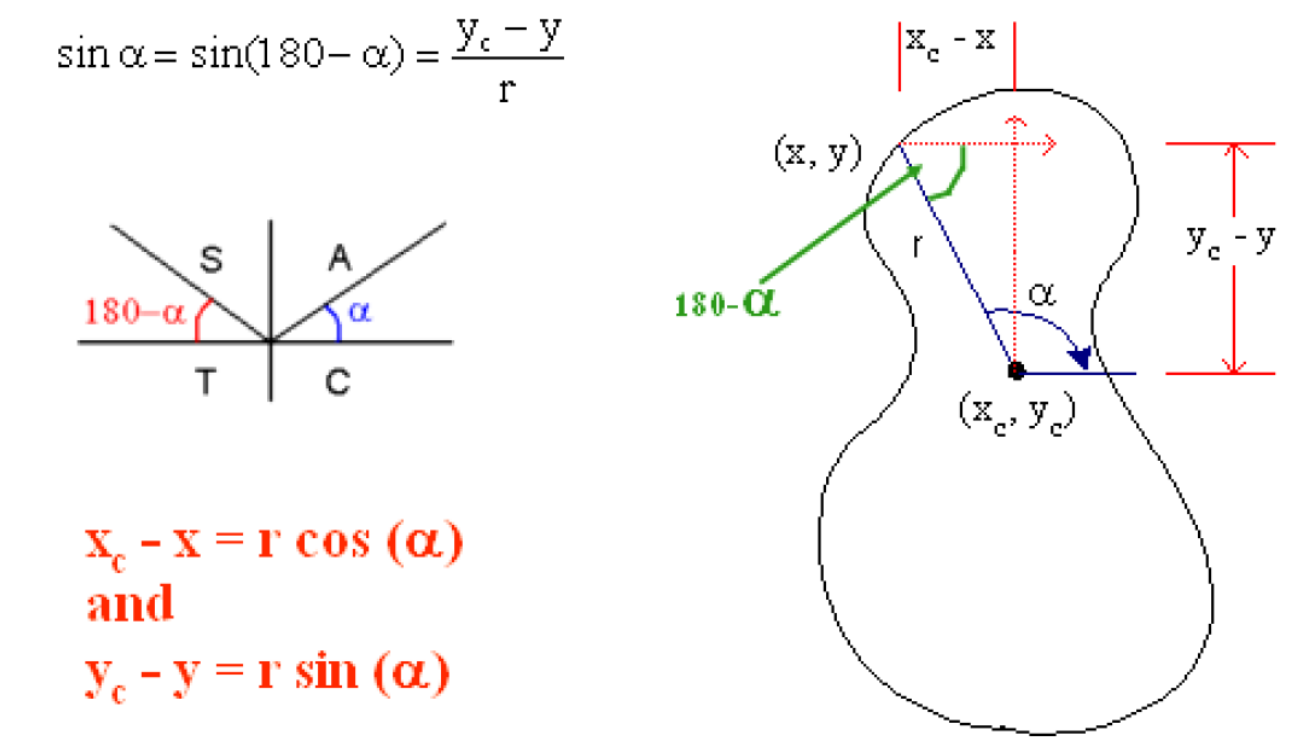
在创建一个形状之前,选择图像的中心点。
对于属于边缘的像素,将直线向中点拖动,并收集以下值。
GHT: R-Table
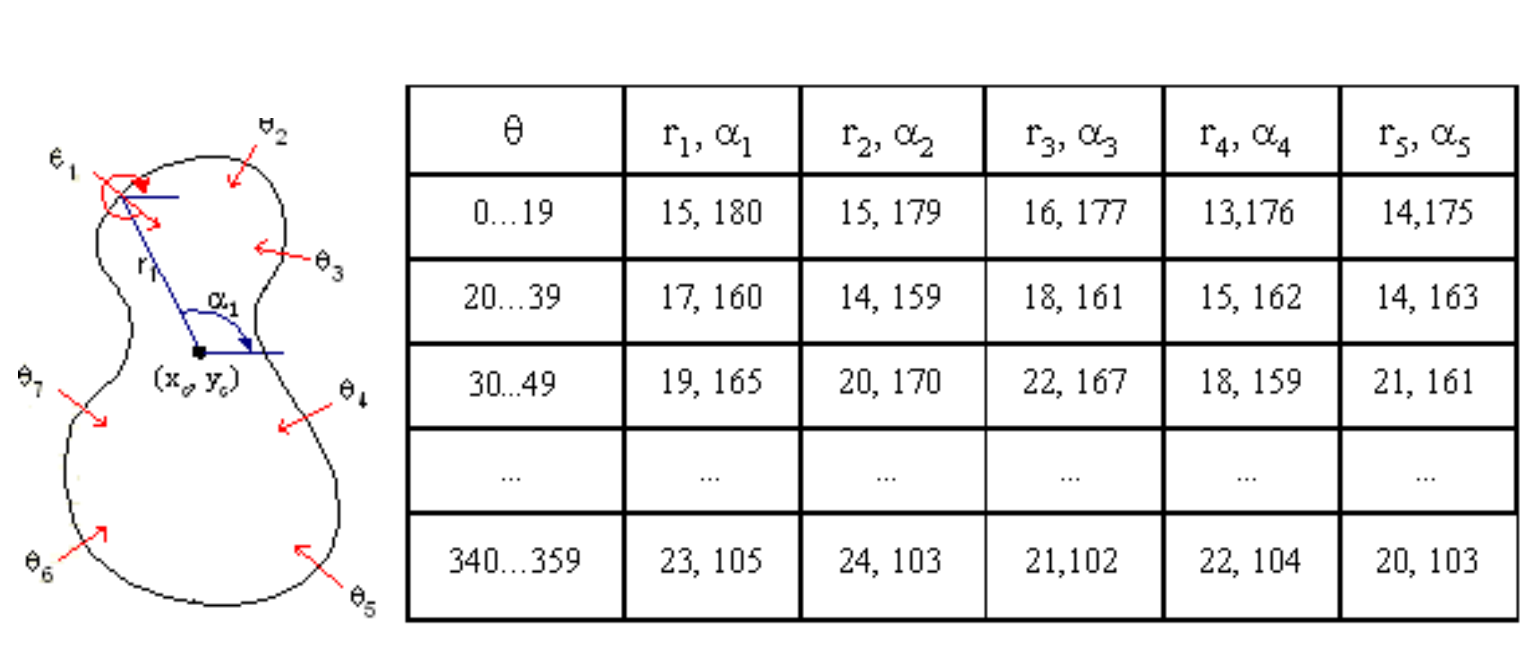
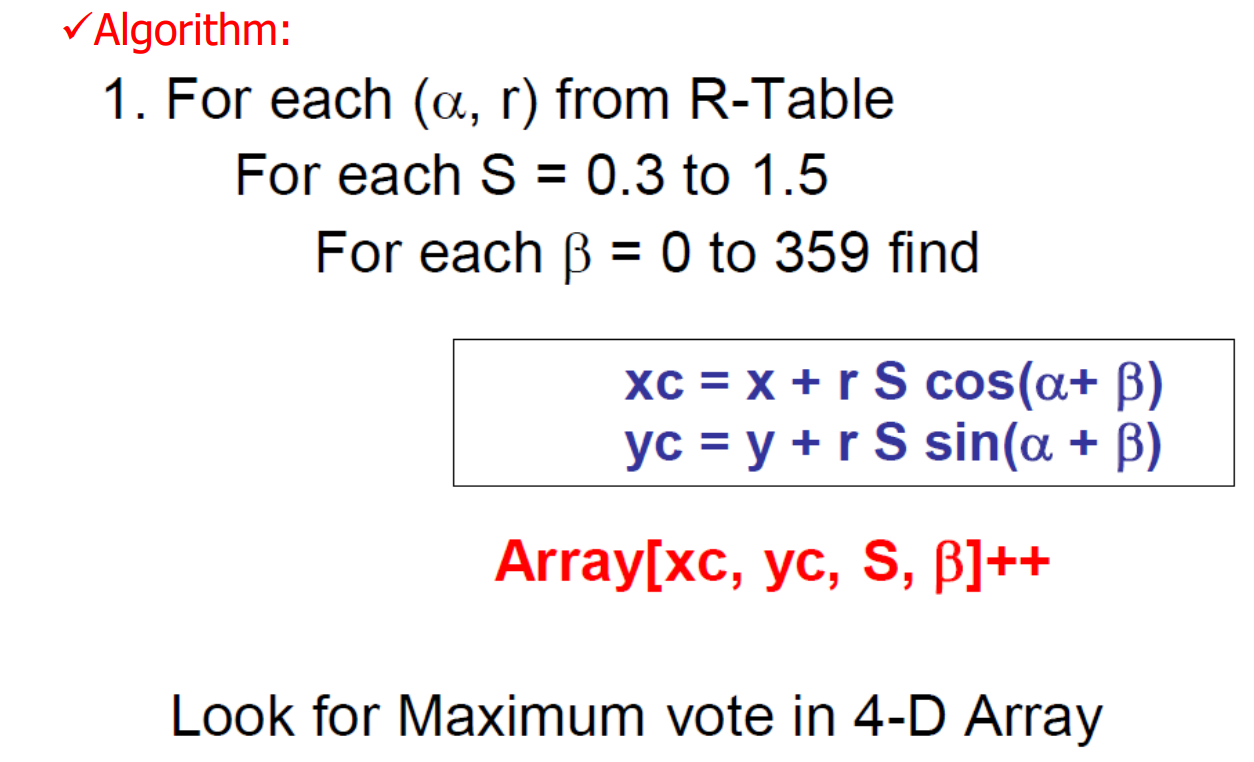
算法
1.找到目标图像的边缘,并收集梯度值grad(梯度方向)。
2.对于每个边缘像素,使用步骤1得到的值(梯度方向)来搜索存储在R表中的值和r,这些值被储存在R-Table中。
3.对于在R-Table中搜索得到的和r的值,根据该值而不是公式中的a和r的值。
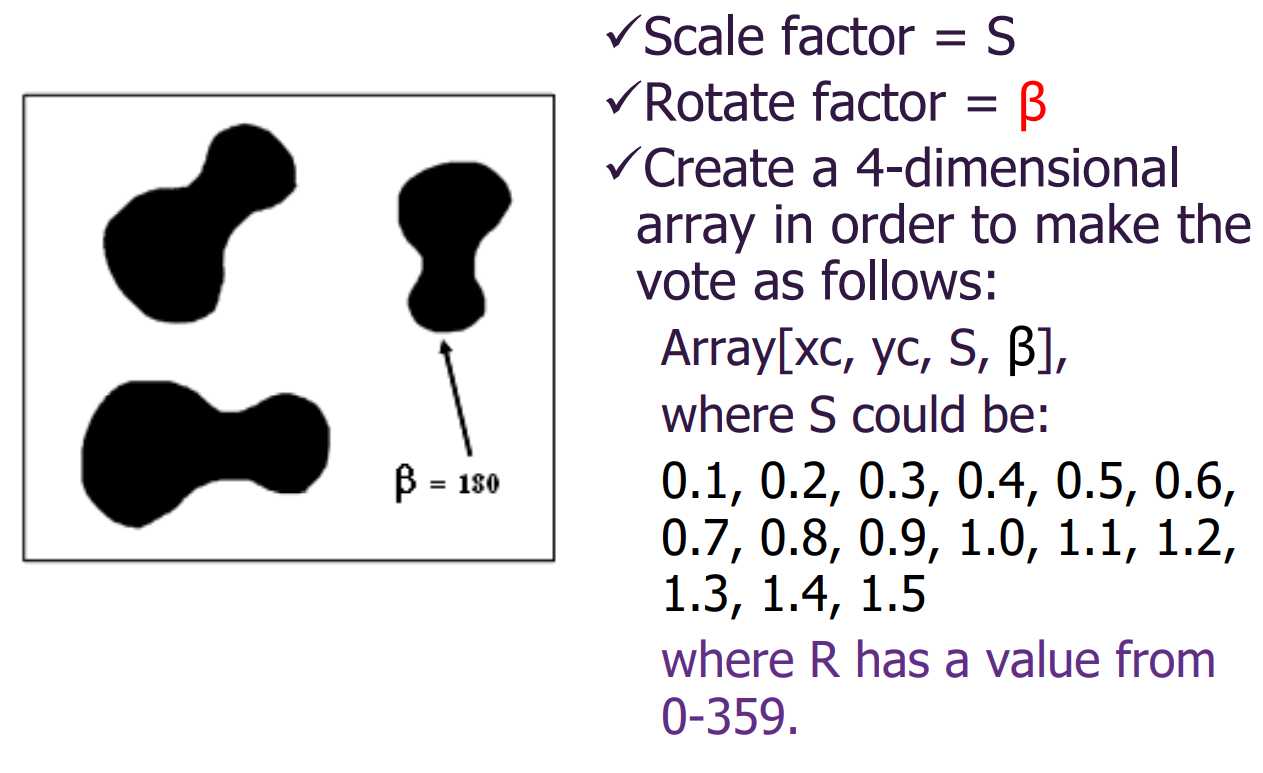
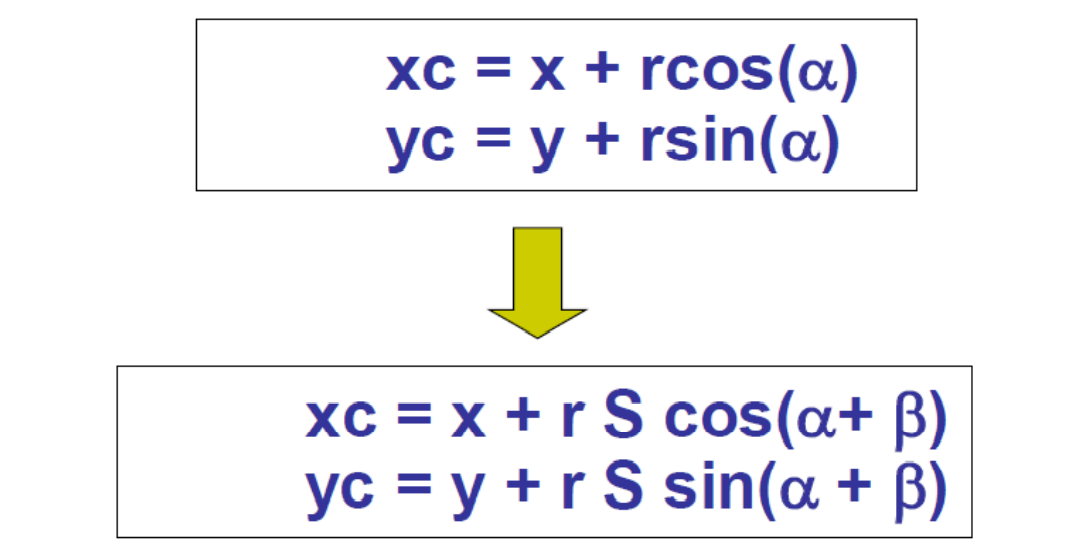
因此,当比例Scale和旋转值Rotate被改变时,旧的方程式将被改变为新的方程式,如下所示:
参考链接:
Find edges in 2-D grayscale image - MATLAB edge - MathWorks United Kingdom
人工智能和计算机视觉(5)-边缘检测
https://fulequn.github.io/2022/08/Article202208082/