多无人机辅助移动边缘计算的高效卸载和轨迹调度
多无人机辅助移动边缘计算的高效卸载和轨迹调度
摘要:移动边缘计算 (MEC) 和无人机 (UAV) 的出现对物联网 (IoT) 的未来发展具有重要意义。额外的计算能力和广泛的网络覆盖为能源有限的智能移动设备 (SMDs) 提供了更多的机会来体验不同的智能应用。本文提出了多无人机辅助 MEC 系统的计算效率最大化问题,同时考虑了计算量和能量消耗。基于部分计算卸载模式,联合优化无人机用户关联、 CPU 周期频率、功率和频谱资源分配以及轨迹调度。由于问题的非凸性和变量间的耦合性,我们提出了一种双环结构的迭代优化算法来寻找最优解。仿真结果表明,该算法在保证计算服务质量的前提下,能够获得比基线方案更高的计算效率。
1.介绍
移动无线通信网络和物联网 (IoT) 的广泛发展,推动了智能移动设备 (SMD) 的空前普及,这为许多新颖的智能应用提供了强大的平台。这些应用,例如人脸识别、互动游戏和自动导航,通常需要密集的计算和带来更多的能源消耗。然而,由于 SMD 的计算资源和电池预算有限,导致了计算密集型应用与有限资源之间的冲突。移动边缘计算 (MEC) 是一种很有前途的方法,它允许 SMD 将其计算密集型的任务转移到边缘服务器,以解决冲突。边缘服务器部署在无线接入网络的边缘,接近 SMD。具体而言,与基于基础设施的蜂窝无线网络 MEC 部署相比,无人机辅助的 MEC 可以支持更灵活的移动计算业务。
无人机辅助的 MEC 系统可以被集成以提供广泛的覆盖和额外的计算能力,特别是对于那些基础设施有限或没有可用基础设施的无线系统,这已经受到越来越多的欢迎。例如,可以部署具有云服务器的无人机,以协助实现应急响应、网络威胁检测和自适应建议。文献 [9]和[10] 研究了无人机的高效部署和机动性,无人机被用作空中基站,通过地面物联网设备上行链路收集数据和计算任务。在文献 [11]中提出了三层无人机边缘云计算体系结构,研究了联合计算卸载和路由优化问题。由于有限的能量是无人机辅助MEC系统设计的主要问题,文献 [12]和[13] 分别侧重于节能资源分配和计算卸载问题。此外,文献 [14]和[15] 在无人机辅助的无线网络中应用博弈论来扩展通信容量,最小化网络开销。然而,由于无人机辅助 MEC 系统具有机动性和能量有限的特点,在满足严格的多目标要求方面仍存在许多挑战,如高计算位和低能耗。
为了提供计算或节能的移动服务,在无人机辅助的 MEC 网络中,更多的努力致力于共同优化资源分配和轨迹调度。文献 [18] 研究了一种基于无人机云的节能移动云计算体系结构,该体系结构综合考虑了位分配和无人机轨迹。针对离散二值模型、有限能量和无人机轨迹设计的约束条件,文献 [10] 中以最小化所有用户的最大时延之和为目标。在文献 [19] 中,考虑了部分计算卸载、社会内容缓存和无线电资源调度等约束条件,提出了一种基于能量感知的社交车联网无人机辅助MEC动态资源分配问题。文献 [20] 研究了无人机无线供电 MEC 网络中联合优化计算卸载和轨迹设计的计算速率最大化问题。在前期工作文献 [21] 中,提出了无人机辅助 MEC 系统中以 SMD和无人机加权平均能耗最小为目标的随机计算卸载、资源分配和轨迹调度联合优化问题。但由于上述工作仅采用了一架无人机来辅助 MEC 的实施,导致网络的可扩展性存在一定的不足。此外,为了扩大网络覆盖范围和服务更多的 SMD,可以使用多个无人机,其中用户关联是一个关键问题,尚未探索。在文献 [22] 中,提出了一种针对挑战网络的多无人机辅助 MEC 基础设施。虽然该系统专注于优化无人机的部署和用户关联,但资源分配和轨迹调度尚未得到解决。在文献 [23] 中提出了一种基于无人机的分层雾云计算系统,该系统综合考虑了计算卸载、用户云/云关联、发射功率分配和路径规划等问题,建立了加权总功耗最小问题。然而,在现有的工作中,对无人机辅助 MEC 系统中计算量和能耗的联合优化问题的研究还不够深入。
近年来,计算效率作为一种新的度量指标在蜂窝 MEC 网络在文献[24],[25]中被提出。在文献[25]中,提出了无线供电 MEC 网络中公平性计算效率最大化问题,文献[26]的目标是使 SMD 计算效率的加权和最大化。计算效率不同于对延迟、能量和计算速率进行单独优化,计算效率是同时衡量 MEC 系统的计算位和能量消耗。因此,为了研究多无人机辅助 MEC 系统的计算效率最大化问题,本文主要研究无人机的用户关联、计算和通信资源分配以及轨迹调度的联合优化问题。本文的主要贡献如下:
- 我们考虑了一种计算效率高的多无人机辅助 MEC 系统,在该系统中,无人机被赋予计算服务器,以支持对处理能力有限的 SMD 的部分计算卸载。
- 通过计算效率来衡量系统的计算量和能耗。在多无人机辅助的 MEC 系统中,通过共同考虑用户关联、 CPU 周期频率分配、该问题为不同变量非线性耦合的非凸问题。
- 针对目标函数的分式结构,将该问题重构为参数规划问题,并提出了一种双环结构的迭代搜索算法来求解该问题。通过建立外环,利用 Dinkelbach 方法对计算效率进行求解和更新。在内环中提出了用户关联、资源分配和轨迹调度的联合优化算法。
本文的其余部分组织如下。第二部分介绍了系统模型和问题表述。在第三节中,为了使计算效率最大化,提出了一种双环结构的高效迭代搜索算法。第四节讨论了仿真结果。最后,我们在第五节总结了本文。
2.系统模型及问题公式
A.系统模型
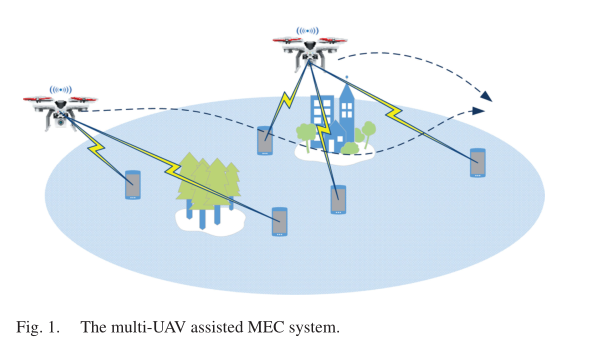
如图 1 所示,考虑一种多无人机辅助 MEC 系统,该系统由 F 个无人机和 M 个地面 SMD 组成,表示为 和 。配备 MEC 服务器的无人机具有强大的计算能力,在地面 SMD 上完成从初始位置飞到指定最终位置的任务。 SMD 用于从环境中收集数据。由于计算资源有限, SMD 收集的部分感知数据可以通过无线链路传输到无人机上执行。该网络场景的实例可应用于智能集中充电、环境监测、协同作战等领域。该系统在指定的任务期间运行。为了便于展示,任务周期被划分为 N 个时隙,时隙长度为 , 。当时隙长度 足够小时,无人机可以飞行较短的距离,并在每个时隙内近似采样信道增益。在每个时隙期间,我们假设每架无人机都为其相关的地面 SMD 提供一个频分多址(FDMA)协议。
我们考虑一个三维(3D)笛卡尔坐标系,其中每个 SMD i∈M 分散在地面上,其水平坐标为 。我们假定飞机在离地面高度 h 不变的情况下飞行。无人机 j 在时刻 n 投影到水平面上的飞行轨迹可以表示为 。进而确定各障碍物中心在 MEC 网络中的水平坐标为 。根据欧几里德公式,我们可以得到无人机 j 与 SMD i 在时间槽 n 处的距离为
一般来说,在 UAV-SMD 无线通信链路中,视距(LoS)信道比其他信道更占主导地位。与[10]和[18]相似,我们将 SMD i 和 UAV j 之间的无线信道视为自由空间路径损耗模型,可以表示为
式中 表示参考距离 处的信道功率增益。对于每个 SMD ,它的任务既可以在本地执行,也可以卸载到无人机上执行。我们引入一个二进制变量 来区分不同的状态。 表示 SMD i 与无人机 j 在时刻 n 关联并服务,否则 。注意, 不仅定义了计算卸载决策,还定义了每个时点的 UAV-SMD 关联。
1)本地计算
为了处理计算任务,每个 SMD 在不同的时隙具有有限的计算能力,记为 。令 ρ 为处理一个比特计算任务所需的 CPU 周期数。这样,在 SMD 上执行的计算位可以得到
根据[20], SMD i 用于局部计算的功耗被建模为 。 为 CPU 的有效开关电容,其值取决于芯片的结构。因此, SMD i 在时间槽 n 处的局部能耗可以表示为
2)无人机辅助边缘计算
当 SMD 选择将计算任务卸载给 MEC 服务器时,输入的数据需要通过无线上行链路传输给无人机。为了避免干扰和数据串扰,每个 SMD 在每个时隙只能关联一个无人机。另外,我们假设 SMD 到同一无人机上行链路的总频谱带宽为 W ,每个 SMD 可以使用不同的频谱资源访问无人机。设 为分配给 SMD i, 的频谱资源的比例。根据 Shannon-Hartley 公式[30], SMD i 卸载到 UAV j 的计算位可以表示为
式中 为 SMD i 的发射功率, 为噪声功率谱密度。传输卸载的计算位所消耗的相应能量由下式计算
因此,在多无人机辅助的 MEC 网络中,总计算位由局部计算位和卸载位组成,计算结果为
式中, X(n) 为无人机用户关联、本地CPU运算周期频率、发射功率、频谱资源和飞行轨迹变量集,X(n) = {s(n), f(n), p(n), α(n), q(n)}。在系统总能耗方面,实际系统除传输和计算能耗外,还涉及到基带处理或备用电池[31]等静态能耗。与[25]类似,我们假设静态功率是一个恒定的 ,与其他能耗无关。那么,用于处理计算任务的 SMD 总能耗可表示为
根据[26],计算效率定义为总计算位数与总能耗的比值,有
B.问题公式
本文重点研究了系统的计算效率最大化问题,同时对本地 cpu 周期频率、发射功率和频谱资源以及无人机飞行轨迹进行了联合优化。研究了部分计算卸载模式。因此,多无人机辅助 MEC 系统的计算效率最大化问题可以表述为
在问题 P 中,C1 和 C2 给出了 SMD 的CPU-cycle frequency和发射功率的约束条件。C3表示每个SMD最多只能关联一个无人机。C4 是与相同无人机相关联的 SMD 的频谱资源分配约束。C5表示任务完成期间每个SMD的总计算位不能小于最小计算位,以保证计算服务质量(QoS)。C6为无人机最大飞行速度约束。C7和C8确保UA Vs之间以及UA Vs与障碍物之间的安全距离,以避免碰撞,其中T1 ={2,…, N}, rm为障碍物m的半径。I N C 9, qI,j, qF,j为UA V j的初始和最终位置。